Process Documentation




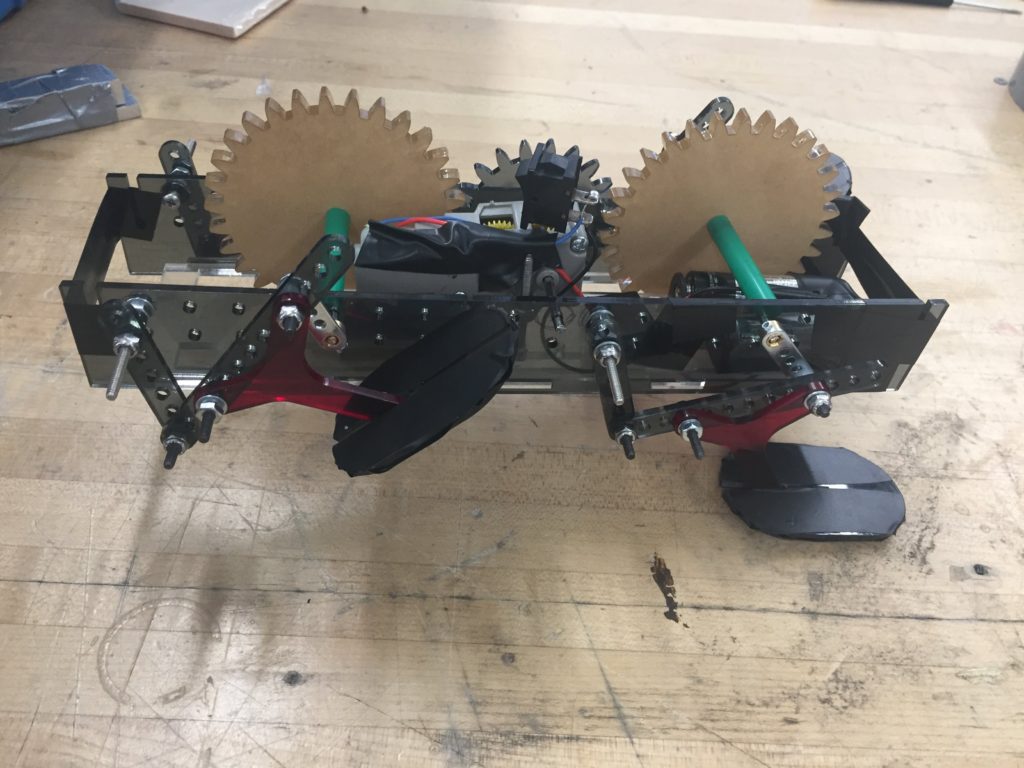
Initial iteration
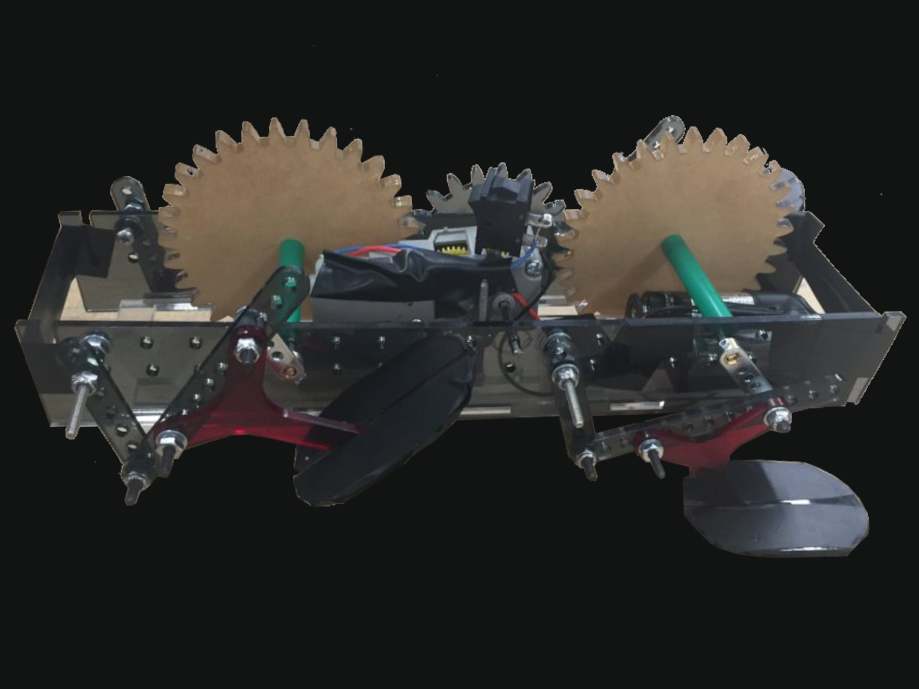
Second iteration, with change in gear ratio
The aim of this project was to design a simple autonomous walking robot that would traverse 3 obstacles as fast as possible: stairs, stones, and hurdles.
Initial iteration


Second iteration, with change in gear ratio